Season 4: Guerlédan Diaries
This year is the first time second year robotics students have travelled to Guerlédan lake with the third year students. For us the aim of the stay is to work on GPS navigation with small boats called DDboats. These new boats were made by our robotics teachers Mr Benoit ZERR and his colleagues.

The stay is composed of a mixture of classes and practical work all aimed at reaching a point where the boats are able to perform a simple choreography on the lake without crashing into each other, a seemingly impossible feat in such short time.
Now the second day has come to an end and not a single DDboat has made it to the water. At that point most of the work has been done on computer simulations, which provide a simplified model of the boat and simulate the precision errors of the GPS. The hardest part is to estimate the position of the boats as precisely as possible.
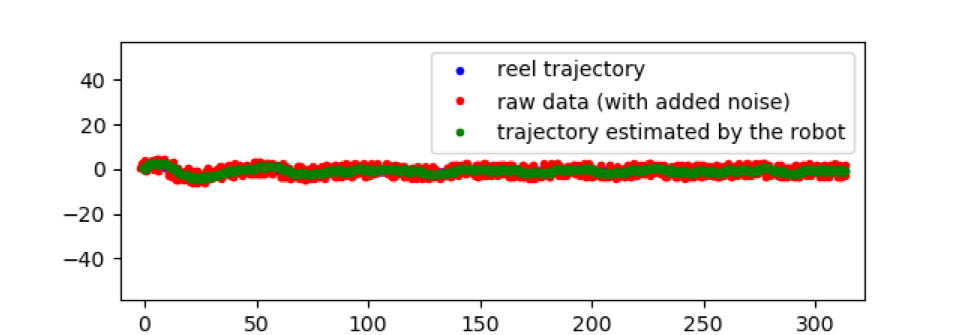
Here is one example where the aim is to keep a given heading. The blue dots (which are mostly hidden by the other dots) correspond to the real trajectory of the boat. The red dots show the simulated GPS values, which have been randomly modified to fake the errors of real GPS measures. Finally, the green dots correspond to the estimated position. A system filters GPS values to get as close as possible to the real values.
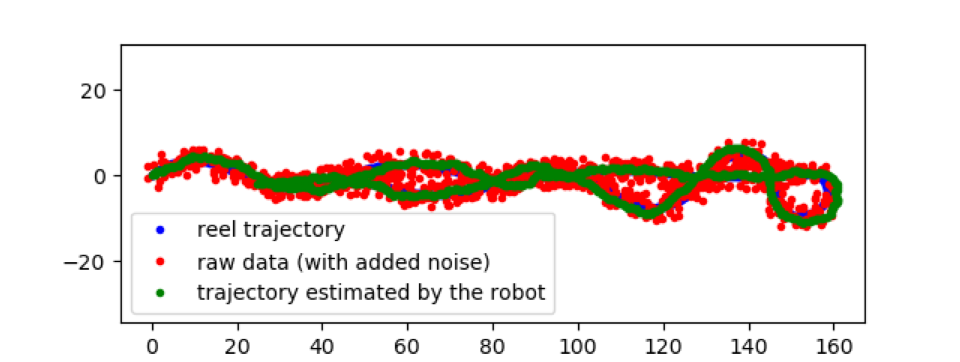
The above picture shows the same kind of simulation but with a U-turn. Indeed, during the first attempts the simulated regulator was so unstable that a U-turn was impossible.
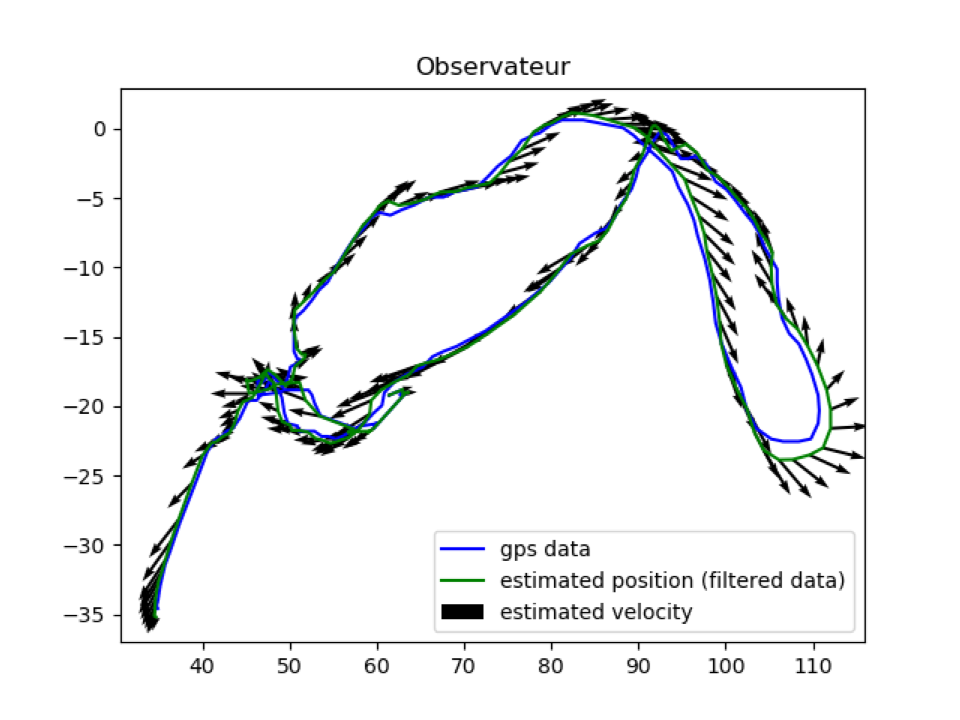
Finally, today was also the first time we had analyzed real world GPS data. Our teacher collected GPS data on the site, by walking the boat around. We than read this data and filtered it. The next picture is a plot of the real data (in blue) and the filtered data (in green). Finally the arrows correspond to the estimated speeds at each point.
And that ends the news for today, see you tomorrow for the latest updates !