Saison 6 – Épisode 3
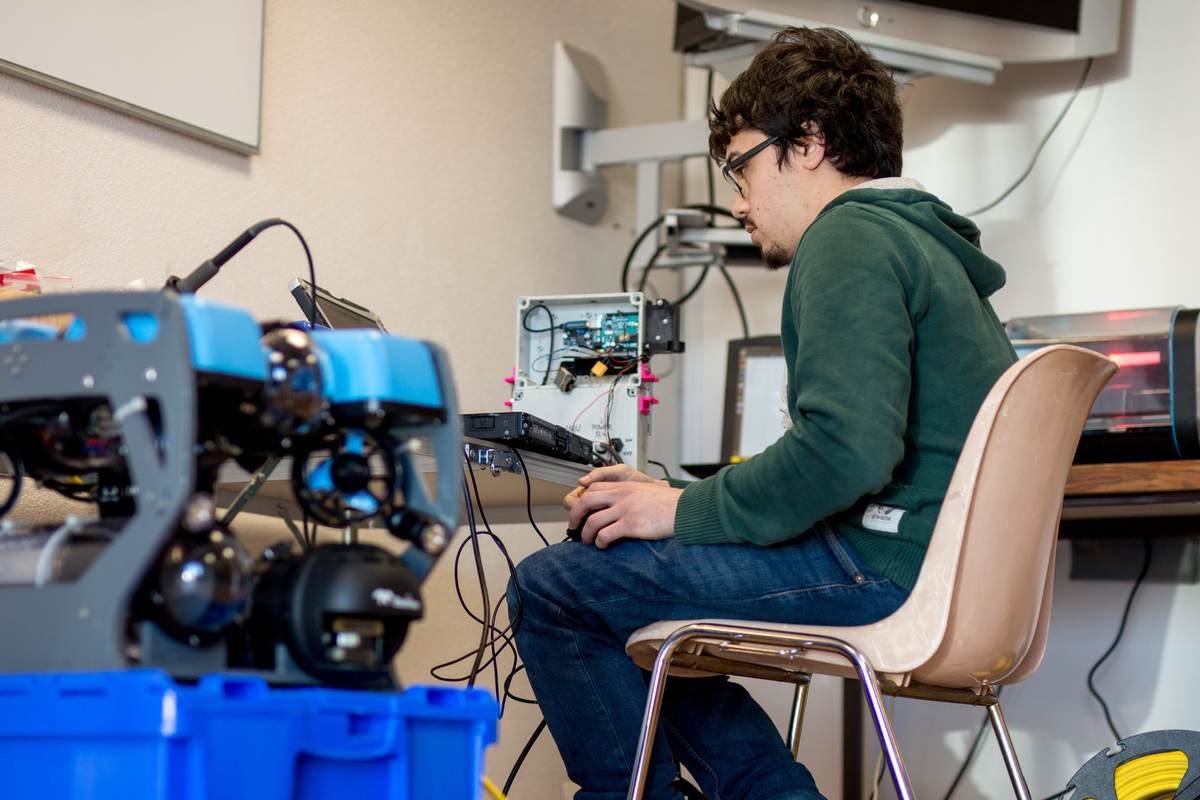
De nouvelles inspections du barrage ont été réalisées aujourd’hui dans le cadre d’un projet d’inspection de structures sous-marines. Avec le développement des éoliennes offshores, la surveillance régulière de telles installations devient un enjeu important. L’idée de ce projet est de réaliser, avec un robot sous-marin autonome, une inspection des structures immergées en utilisant l’architecture du site pour se repérer. Les signaux GNSS ne se propageant pas sous l’eau, l’utilisation de caméras optiques et de sonars devrait permettre de reconnaitre les structures et donc de retrouver où le robot est positionné sous l’eau.

Les robots sous-marins peuvent également travailler en équipe. Nous nous sommes intéressés au concept d’un robot sous-marin compagnon qui servirait à éclairer la zone de travail du robot principal ou à l’assister quand des manipulations complexes sont nécessaires. Une des difficultés est de ne pas emmêler les câbles lorsque ces robots sont reliés à la surface par un ombilical. Il faut également que le robot compagnon soit capable de suivre correctement les mouvements et les consignes du robot principal ce qui est un problème difficile sous l’eau et avec une faible visibilité.

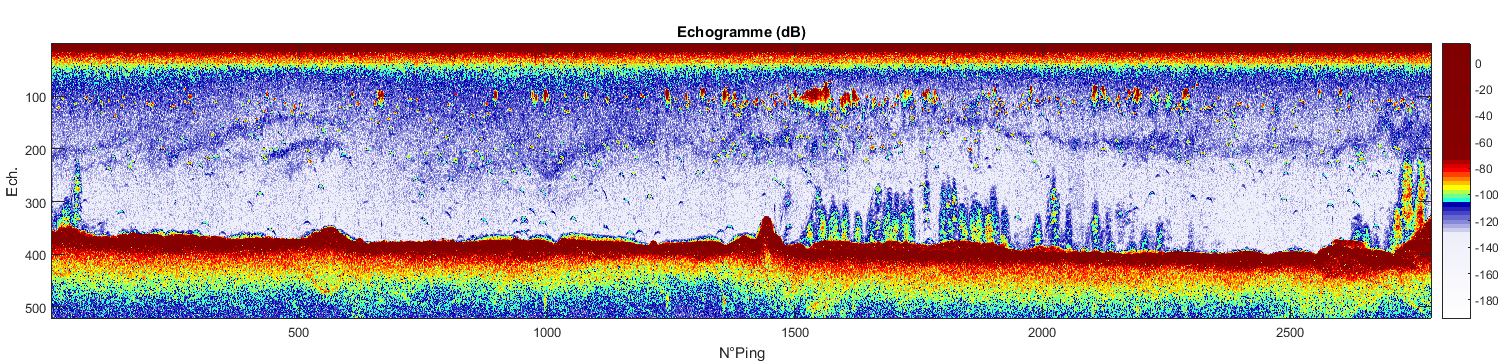
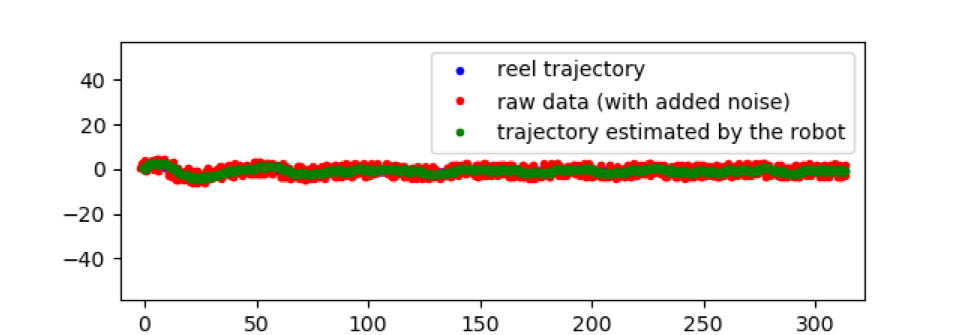
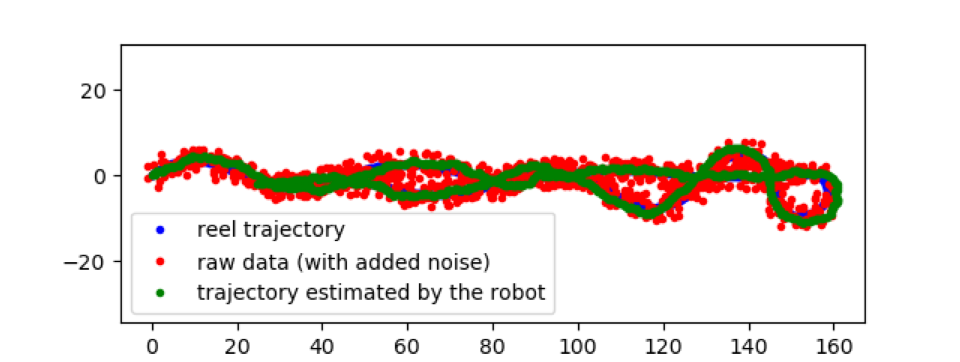
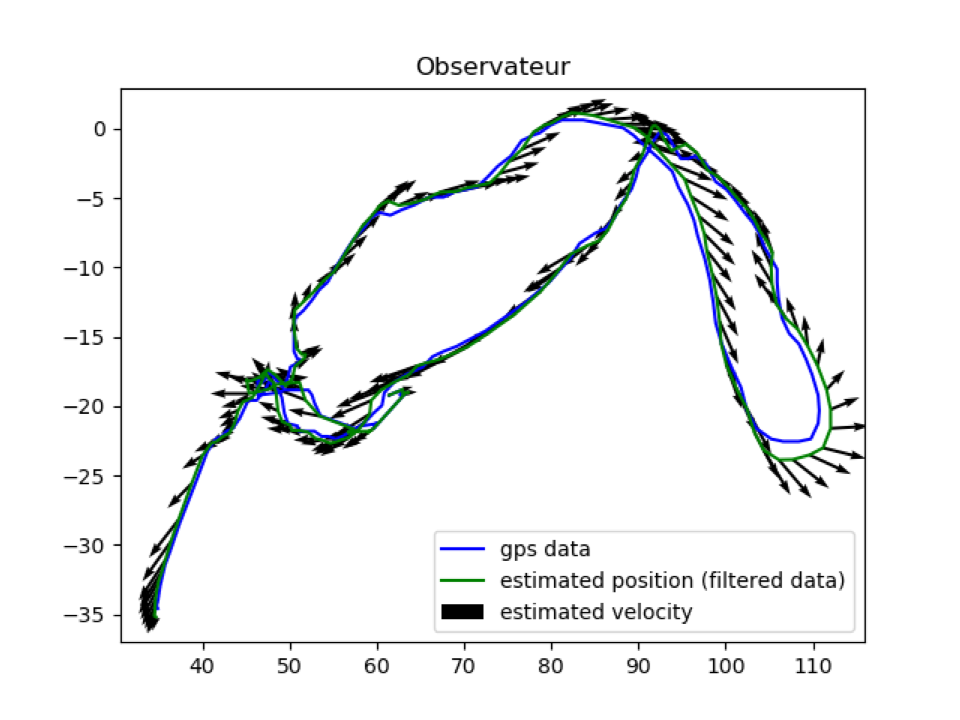
L’acquisition des données de profondeur pour la fabrication de cartes marines va fortement évoluer grâce à l’utilisation de robots autonome. Le problème de localisation de ces robots est donc crucial. Pour améliorer la localisation du robot, un projet très innovant s’intéresse à l’analyse des zones que le robot aura vues deux fois, ce qui est souvent le cas pour garantir que toute une zone a été couverte. Si la trajectoire estimée du robot est cohérente, les mêmes choses doivent être observées la seconde fois que le robot passe sur une zone. Dans le cas contraire, il est possible de réestimer la trajectoire du robot et donc de l’améliorer. Différentes zones du lac ont été étudiées pour obtenir plusieurs types de fond et tester les limites des algorithmes.

Des marégraphes qui mesurent la hauteur d’eau ont été installés au fond du lac à des positions stratégiques. Ils cherchent à déterminer si des seiches sont présentes dans le lac de Guerlédan. Ce phénomène correspond à l’apparition sous l’effet du vent d’une onde particulière, comme de la houle, qui dépend de la forme du lac. Des capteurs de vents ont également été installés pour comparer les modèles aux données expérimentales.

Les DDboats ont progressé en autonomie cette semaine. En février prochain, un challenge avec les étudiants d’Erasmus Mundus MIR à Guerlédan consistera en plusieurs courses de bateaux autonomes. Les roboticiens de deuxième année ont affuté leurs algorithmes pour être les meilleurs. Au programme, il faudra effectuer des parcours entre plusieurs bouées ou passer par des portes à un instant précis. Cela requiert de prendre en compte la trajectoire, la vitesse du bateau ainsi que les paramètres environnementaux tel le vent.

Pour conclure cette première semaine sur le lac de Guerlédan, nous notons que la transmission de connaissances entre deuxième et troisième année a déjà bien commencé !