Season 4 : Guerlédan Diaries

Day 1
After a two-hour bus trip, ENSTA Bretagne 3rd year hydrography and oceanography students as well as 3rd and 2nd year robotics students discovered the inviting weather conditions at Guerlédan.
But why do ENSTA Bretagne students head to Guerlédan lake each year?
Two weeks a year, this place is turned into a real-size test laboratory. The lake bed was documented the last time the lake was emptied, so hydrography and oceanography students can explore it using the techniques they have learnt, and check their findings against the available data. The Guerlédan lake also provides students with rich opportunities to explore maritime application of robotics, conduct experiments and hone their problem-solving skills.
What did ENSTA Bretagne students do during this first day?
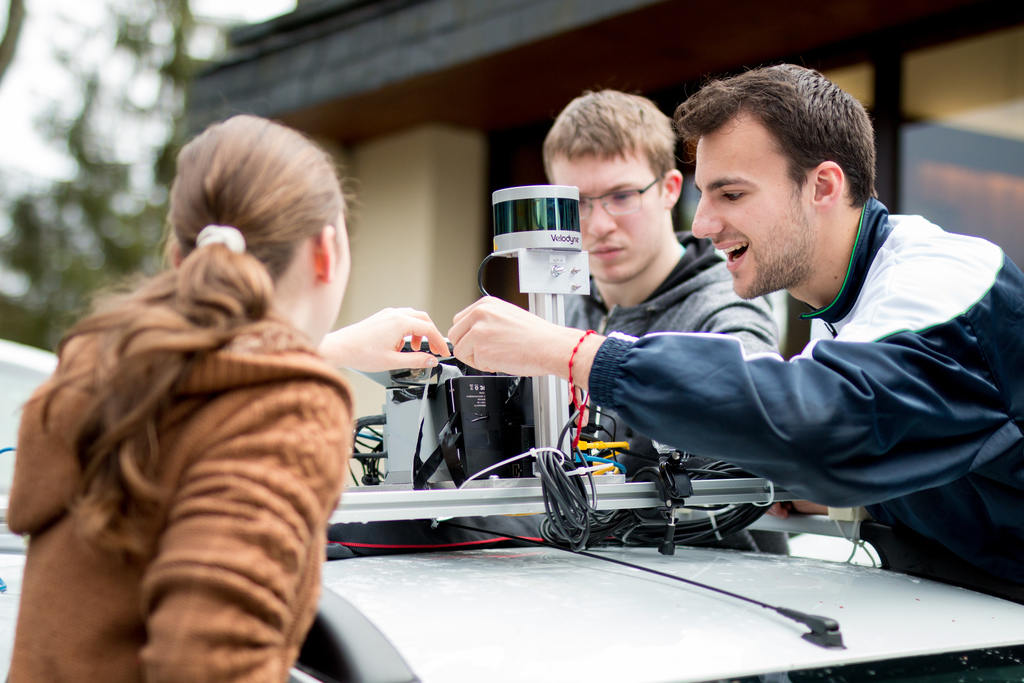
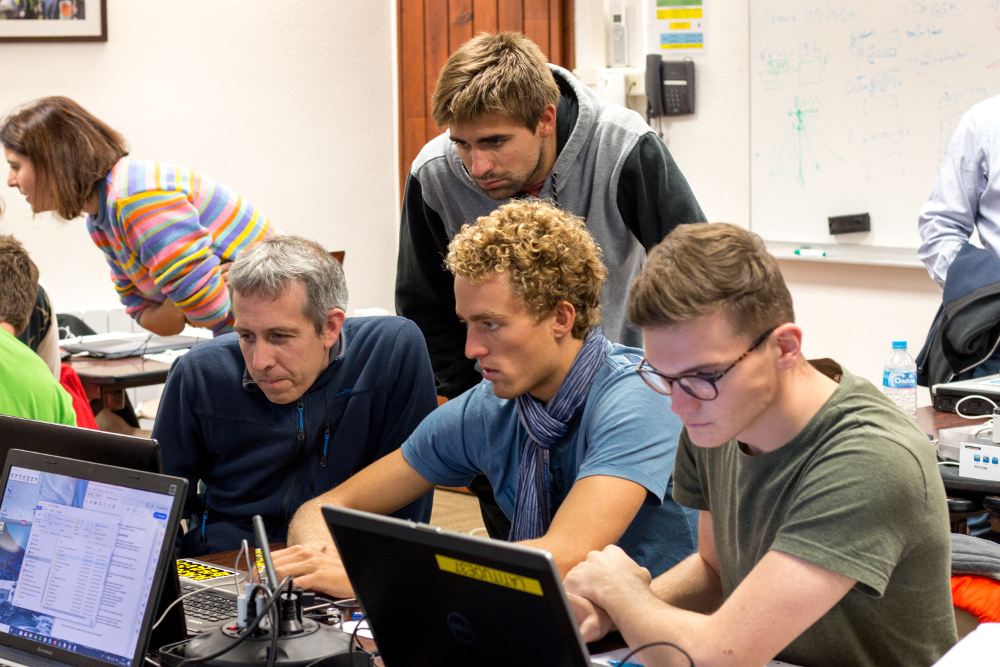
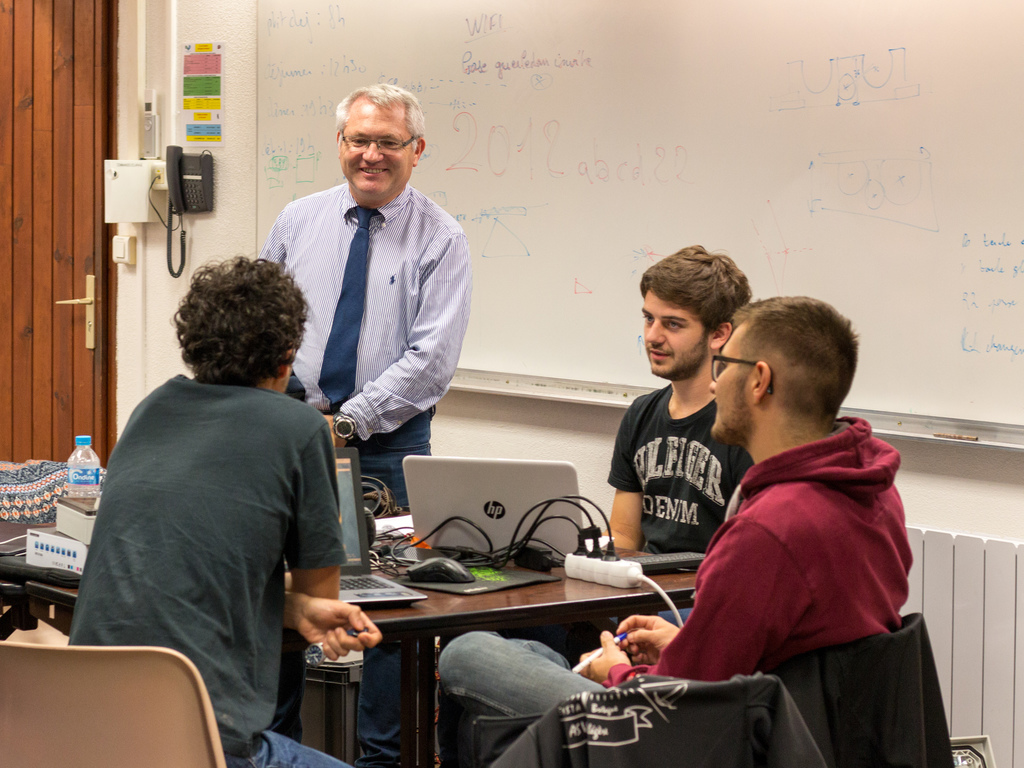
Once on site 3rd year students quickly started working on their respective projects, while the 2nd year robotics students attended a lesson on inertial navigation systems.
After lunch, students got back to work. 2nd year students kick-started their English podcast production workshops by making contact with the groups they will be reporting on all week.
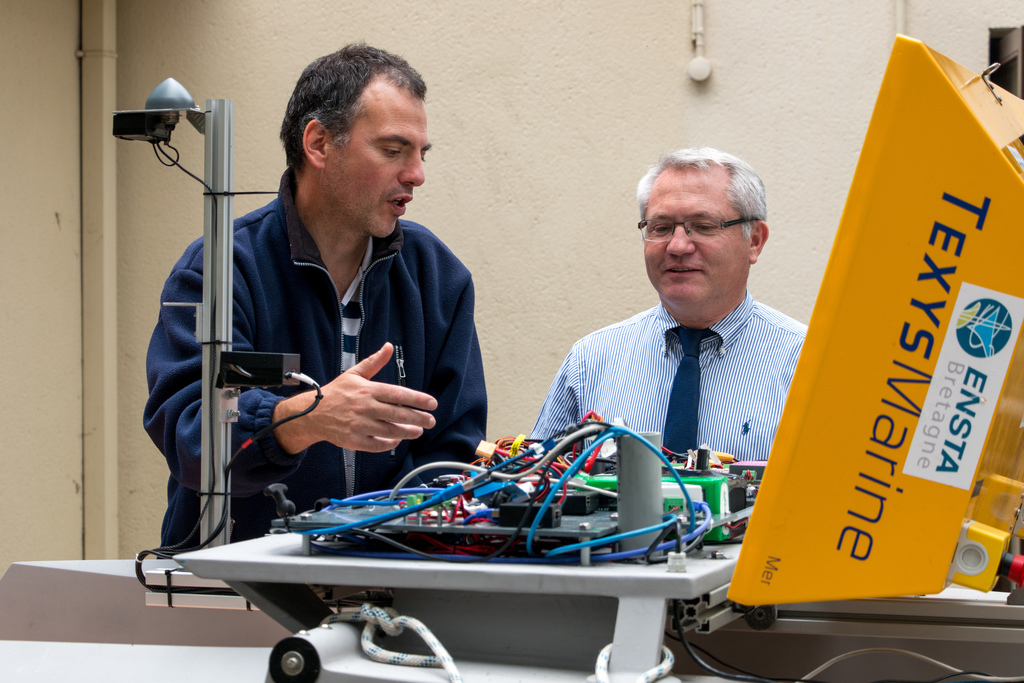
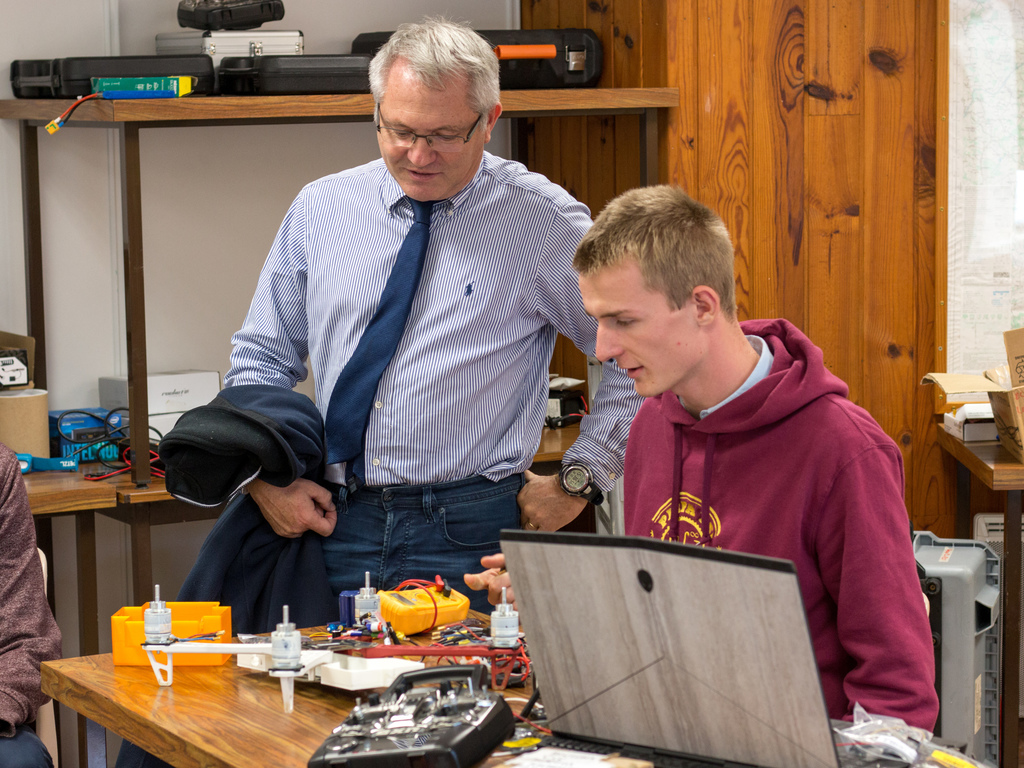
A focus on “Isobath tracking with an Autonomous Underwater Vehicle” project.
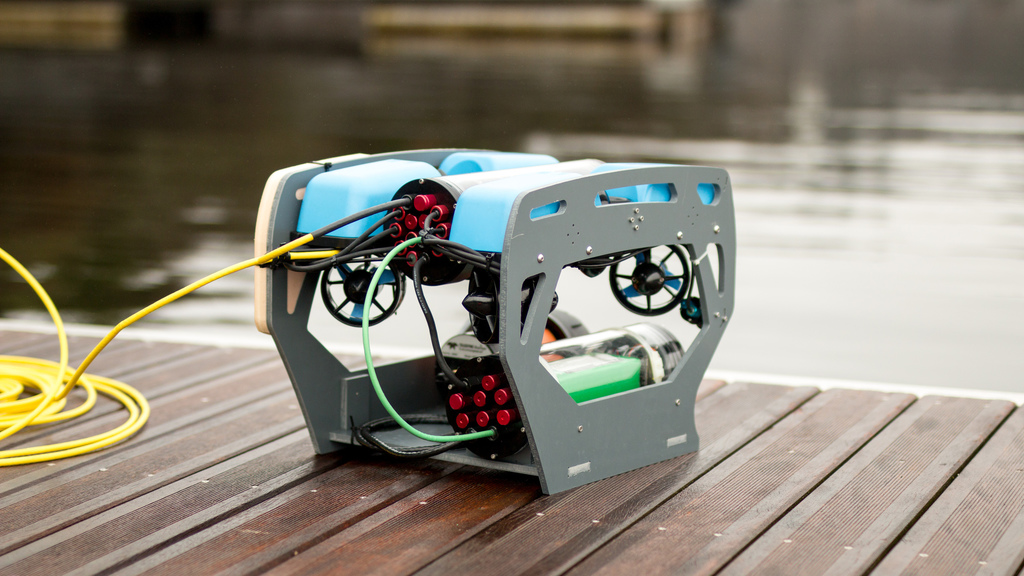
Four robotics students are currently working on a torpedo-shaped underwater drone.
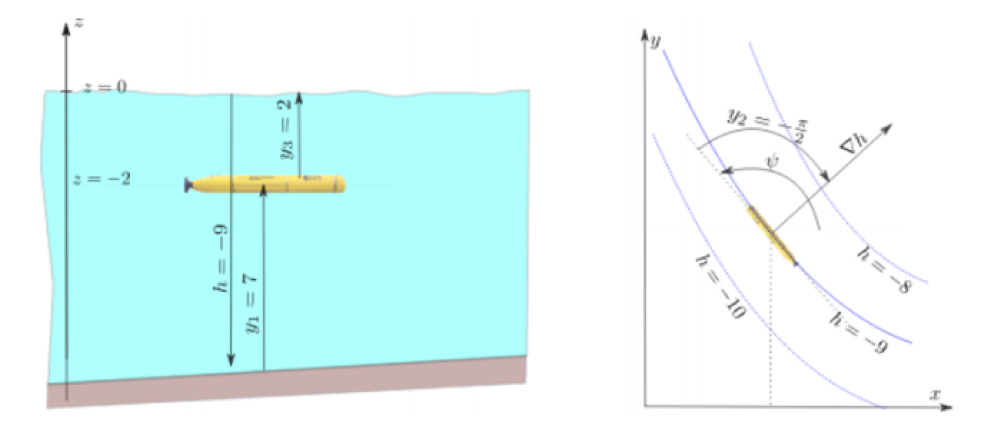
This drone is meant to follow an isobath and must be autonomous as it is immerged.
An isobath is an imaginary line or a line on a map or chart that connects all points having the same depth below a water surface – an ocean, a sea, or a lake.
A thruster located at the back of the Autonomous Underwater Vehicle allows it to move forward. Four other water pumps steer the drone. The motor of the drone has been fixed today, as it was defective.
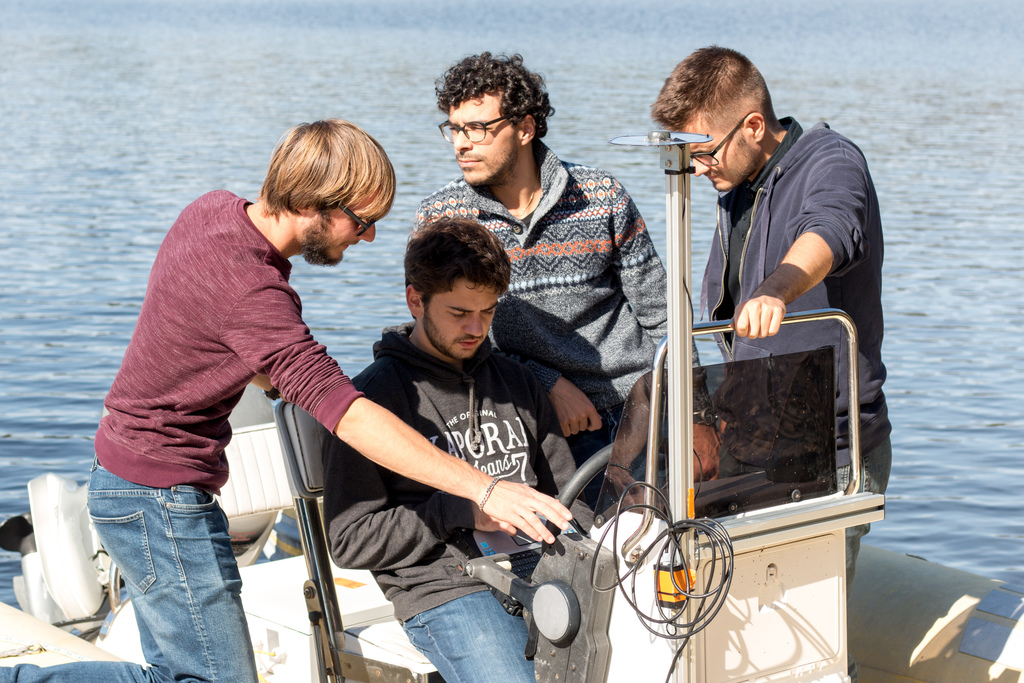
Focus 2: The BOATBOT
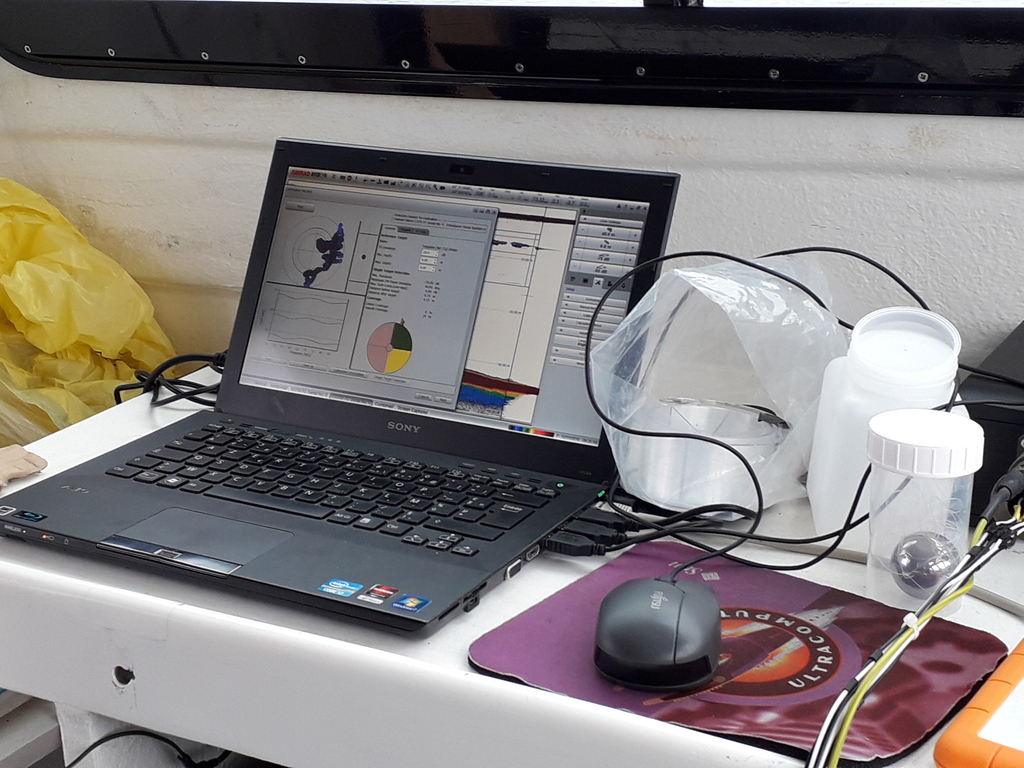
The boatbot project consists in automating a motorized zodiac so it can draw a map of the seabed. The zodiac can already steer itself but has yet to be able to regulate its speed, which is what Erwann, David and Philipert hope to achieve by the end of this week. They are also exploring ways to adjust the length of the underwater probe in order to avoid collisions.

Boatbot has been designed to look for La Cordelière, a Breton battleship built in the fifteenth century, equipped with two hundred guns and manned by a thousand crewmen. It was part of Duchy of Brittany’ Navy and was destroyed during the battle of Saint-Mathieu: while the ship was in Brest hosting the celebrations of Saint-Laurent’s day, the English fleet was preparing a landing in Brittany, and the Cordelière was dispatched to intercept them. It was met by a larger English fleet, and fought valiantly against the British ship “Regent”, and both ships were destroyed after the Regent tried to board the Cordelière. It is estimated that two thousand men died in the battle, and among them were three hundred civilians still on board the Cordelière. All previous attempts to locate its wreck have been in vain and its location remain unknown in Brest bay.