











































Saison 3 : jeudi 7 février 2019













Saison 3 : mercredi 6 février 2019



Saison 3 : mardi 5 février 2019
Dans une brume qui s’épaissit…







Saison 3 : lundi 4 février 2019
Une nouvelle session commence pour le projet Guerlédan, dans la pluie, la brume et le froid de ce mois de février.
Les étudiants ont retrouvé leurs marques et poursuivent leurs projets dans le calme de la base nautique.









Saison 3 : vendredi 12 octobre 2018
La dernière journée été consacrée aux ultimes expérimentations et au rangement du matériel. Les étudiants et les encadrants se sont ensuite préparés à reprendre la route vers Brest, en quittant les beaux rivages de Guerlédan.

Le groupe colonne d’eau a pu commencer à traiter les données acquises jeudi après avoir récupéré les marégraphes mis à l’eau en début de semaine.

Leur objectif est d’utiliser des moyens acoustiques dans le but d’analyser la biodiversité au sein du lac de Guerlédan.
Grâce à l’Ifremer, co-encadrant du projet, les étudiants ont à disposition pendant une journée des sondeurs monofaisceaux halieutiques de pointe, à différentes fréquences : Kongsberg EK80 (70kHz, 200kHz, 333kHz). Ces sondeurs ont la particularité de fournir une information acoustique précise de la position d’une cible dans leurs faisceaux (poisson, plancton, etc.), et de pouvoir être calibrés en niveaux. Ils sont aujourd’hui utilisés par l’Ifremer pour l’évaluation des stocks dans les eaux françaises.
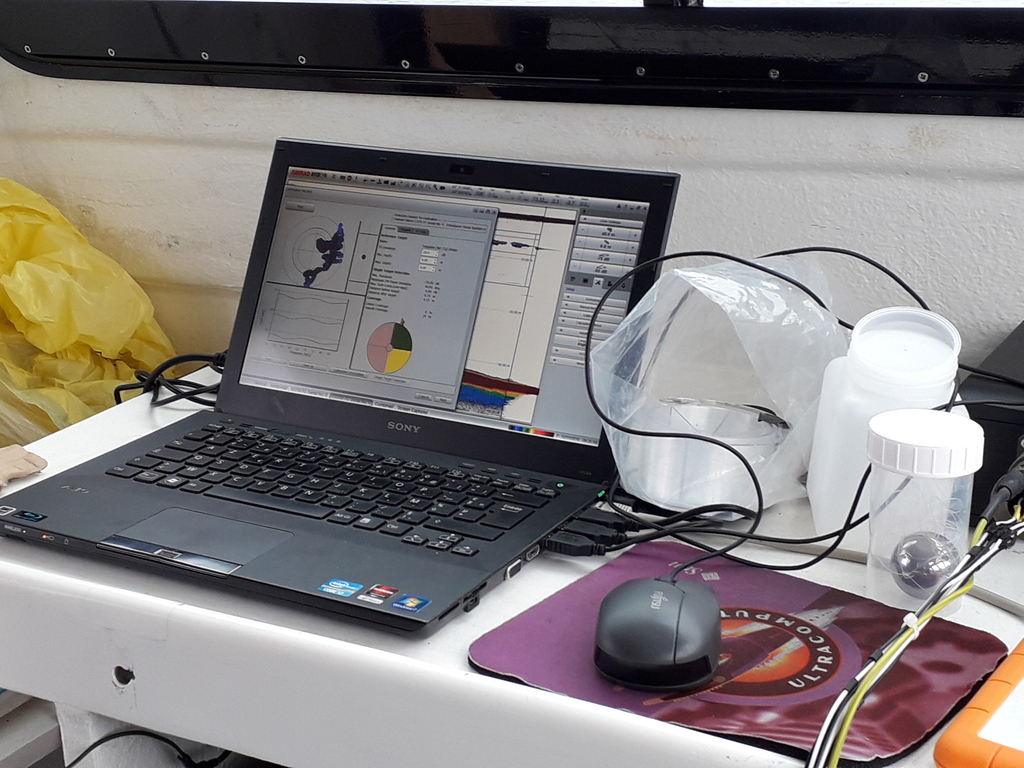
Durant ce projet, les étudiants ont pu participer à la mise en place des sondeurs et à leur étalonnage sur sphère, accompagnés par l’Ifremer présent sur place. Ils ont ensuite réalisé le levé sur l’ensemble du lac de Guerlédan pour identifier les espèces présentes et leur disposition au sein de la colonne d’eau (couches diffusantes, thermocline, poissons dispersés, …). Ces mesures acoustiques sont complétées par des mesures de température, salinité, fluorimétrie, turbidité, ainsi que par des prélèvements au filet à plancton dans les différentes masses d’eau définies grâce aux mesures précédentes.
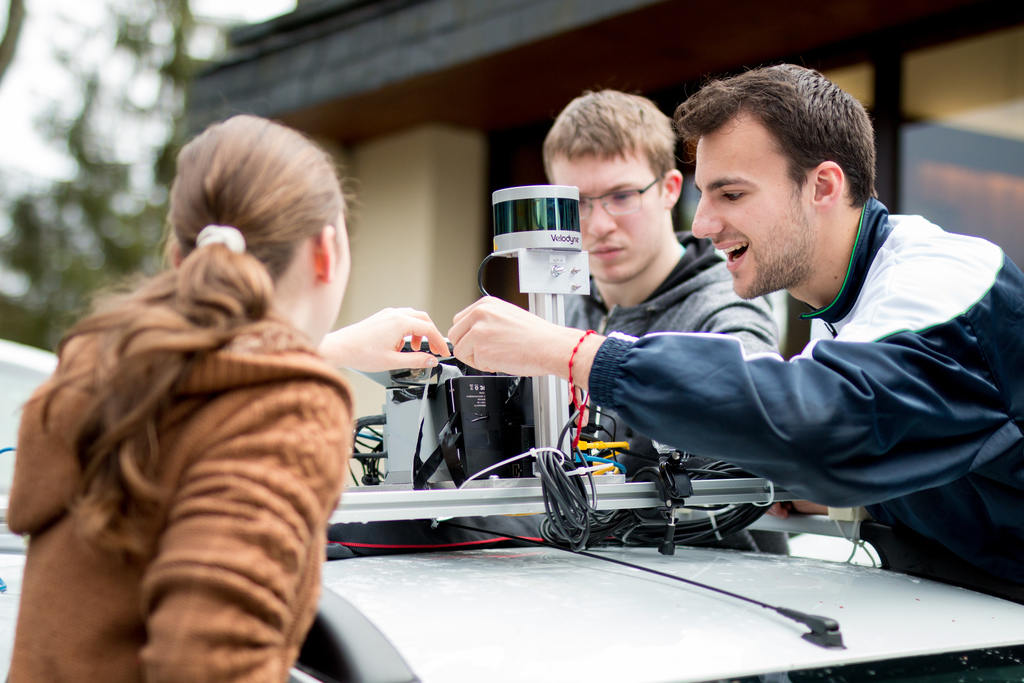
Pendant ce temps, le groupe INS/LIDAR a pu acquérir – après de multiples rebondissements – des données de qualité.

Cette étude, en partenariat avec iXblue, a pour objectif de pouvoir se passer de GPS pour recaler les données issues de centrales inertielles. En effet, les centrales inertielles sont des instruments indispensables à la mesure précise du mouvement d’un mobile (flottant, volant, roulant, ou marchant), mais ont la désagréable propriété de dériver au cours du temps. Pour cela, on utilise classiquement les informations de position d’un GPS pour recaler le système. Par contre, quand le GPS n’est pas disponible, il faut trouver une autre méthode. La solution proposée aux étudiants est d’utiliser un lidar volumique, qui balaye l’environnement sur 360° en continu et permet de mesurer le déplacement du porteur par rapport à la scène scannée.
Leur mission est de valider la méthode. Quoi de mieux qu’une équipe mixte robotique/hydrographe pour le faire, leurs compétences étant très complémentaires. Malgré tout, la centrale et le lidar ne se sont pas laissés faire et ont posé plein d’embûches à l’équipe de choc qui a su relever le défi.
Nous remercions nos partenaires l’AFHy, ECA, EDF, ENSG, Ifremer, Kopadia, MacArtney, l’École Polytechnique, QPS, Shom, Teledyne, TERIA, ainsi qu’iXblue avec la présence d’une ingénieur toute la semaine pour aider nos étudiants.
Saison 3 : mercredi 10 octobre 2018
Troisième jour au pays de Guerlédan, et déjà le soleil laisse sa place aux nuages et aux premières gouttes de pluie. Cela n’a pas empêché de poursuivre les expérimentations, ni la venue du Directeur de l’ENSTA Bretagne qui a pu échanger avec chaque groupe d’étudiants.
Le Directeur a également pris part à un levé bathymétrique avec deux étudiants du groupe de bathycélérité, qui après deux jours de codage informatique, ont enfin eu accès à la vedette Panopée.

Leur objectif : enregistrer des données du sondeur multifaisceau leur permettant de valider l’algorithme juste programmé. Ce dernier est une méthode innovante proposée par iXblue pour estimer le profil de célérité sonore du lac directement à partir des mesures d’un sondeur multifaisceau.
Ce profil est indispensable à l’obtention d’un modèle numérique de terrain de qualité, mais il est mesuré actuellement en descendant un capteur dédié à grande profondeur, ce qui peut être fastidieux. Le nouvel algorithme devrait rendre l’opération plus aisée. À présent, tout est prêt pour comparer la nouvelle méthode en situation réelle par rapport à l’état de l’art.
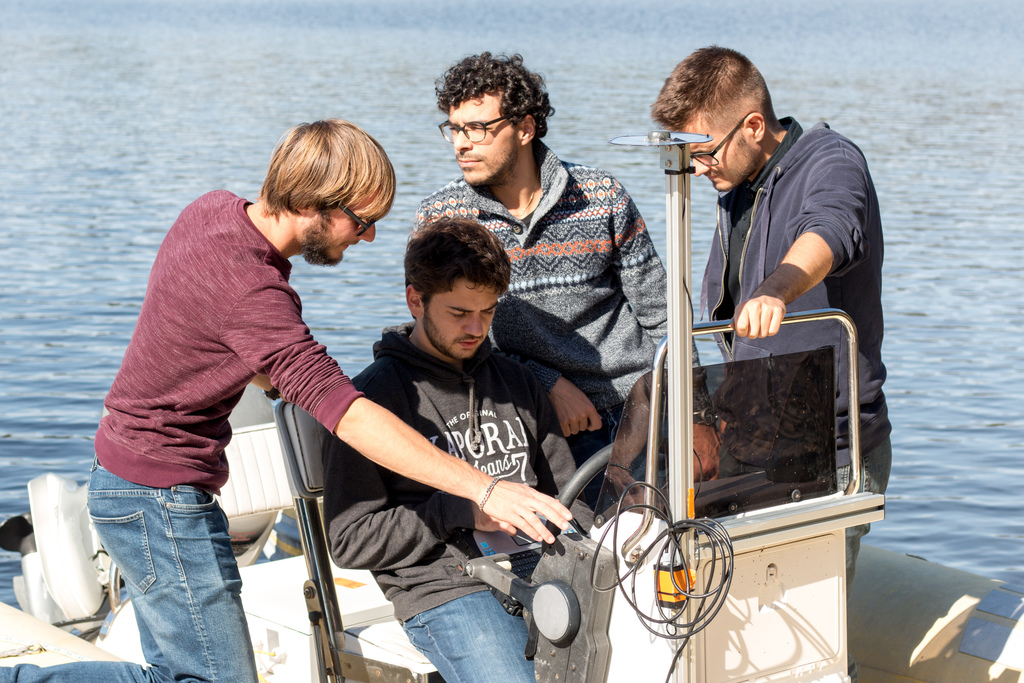
Le Directeur a aussi pu apprécier l’évolution de quelques robots sur le lac, dont le robot voilier autonome BRAVE qui a remporté la WRSC (World Robotic Sailing Championship) en 2018 à Southampton.
On le retrouve de nouveau à Guerlédan où trois étudiants ont pour objectif de naviguer « à l’ancienne » sans GPS. La mission est de rejoindre une position éloignée du point de départ du bateau en utilisant seulement une boussole et une caméra. En naviguant de bouée en bouée, dont leur position est connue, une stratégie doit permettre de garantir la détection des bouées suivantes par caméra.

La navigation entre les bouées s’effectue uniquement sur un suivi de cap, déjà implémenté par les élèves dès les premiers jours. Au préalable, il était nécessaire de s’initier au montage du voilier et à découvrir quelques notions de navigation à voile, notamment la manière de naviguer selon la direction du vent.
Une prise en main du suivi de waypoints, déjà implémenté et se basant sur le GPS, a permis de réaliser les premières missions autonomes. Pour des raisons de sécurité, une manipulation du voilier par radiocommande permet de reprendre la main si nécessaire. La direction du vent, actuellement mesurée par un capteur embarqué, pourrait par la suite être estimée avec des techniques actuelles de Deep Learning en se basant sur les données de la centrale inertielle et la détection d’une bouée afin de s’affranchir du capteur de vent.
Ce projet s’inscrit dans le cadre des travaux de thèse de Thibaut Nico (ECA Robotics).

Nous remercions nos partenaires l’AFHy, ECA, EDF, ENSG, Ifremer, iXblue, MacArtney, QPS, SHOM, Teledyne, TERIA, ainsi que l’entreprise Kopadia, spécialisée dans les domaines de l’inspection industrielle sous-marine et les mesures d’impact environnemental, qui participe au projet Guerlédan en mettant à disposition un AUV présenté dans la newsletter de lundi. Ce mercredi, deux représentants de Kopadia ont fait le déplacement pour suivre les avancées du projet de suivi d’isobathe.
L’École Polytechnique est également présente pour la suite du projet FlyingFish, porté ici par deux étudiants de deuxième année.
Saison 3 : mardi 9 octobre 2018
Le soleil est toujours au rendez-vous pour cette deuxième journée d’expérimentations : des conditions idéales pour poursuivre les essais sur le lac. Fort heureusement, les aléas techniques rappellent la dure réalité du terrain. L’absence d’un vent brestois et les reflets du soleil sur l’eau sont aussi une autre réalité pour les étudiants travaillant sur le robot voilier autonome et sa détection de bouées.


Le groupe d’étudiants hydrographes chargé de cartographier les habitats lacustres a effectué l’acquisition de nouvelles données bathymétriques multifaisceau. Le modèle numérique de terrain résultant, décrivant la topographie du fond du lac pour l’automne 2018, sera comparé aux modèles des années précédentes afin d’évaluer l’évolution morphologique des fonds.

Par ailleurs, les mesures de température, turbidité et concentration de chlorophylle ont été réalisées afin de caractériser les propriétés physiques des différentes masses d’eau. Ces données seront également utilisées pour l’amélioration et la validation du modèle hydrosédimentaire développé l’an dernier. L’objectif de ce projet étant d’intégrer toutes ces informations pour réaliser une segmentation du lac permettant d’identifier les zones propices à la vie.

Côté robotique, trois étudiants prennent en main BoatBot pour lui implémenter un suivi de ligne intelligent. Le projet BoatBot a commencé en juin 2018 dans le cadre des recherches menées par le DRASSM (Département des Recherches Archéologiques Subaquatiques et Sous-Marines) pour retrouver l’épave de la Cordelière. L’ENSTA Bretagne a participé à ces expérimentations en développant le robot BoatBot. Ce robot est une version autonome du zodiac R’lyeh de l’ENSTA-Bretagne. Pour le projet Guerlédan, BoatBot a été repris afin d’améliorer le contrôle de trajectoires et par la suite obtenir une carte au magnétomètre du lac, toujours dans l’objectif de l’appliquer à la recherche d’épaves.
Les étudiants ont pris en main les algorithmes d’automatisation et effectué des tests du programme de suivi de lignes existant. L’étape suivante est d’ajouter un canoë-kayak tracté par Boatbot, équipé d’un magnétomètre, d’un GPS et d’une centrale inertielle.
Nous remercions nos partenaires l’AFHy, ECA, EDF, Ifremer, iXblue, Kopadia, MacArtney, l’École Polytechnique, QPS, SHOM, Teledyne, TERIA, ainsi que l’ENSG (École Nationale des Sciences Géographiques), venue en renforts avec 30 étudiants et encadrants. L’occasion de travailler de concert pour réaliser un modèle numérique complet du barrage : la parement aval sera modélisé par l’ENSG au laser et avec des prises de vues par drone, et le côté amont par nos étudiants avec l’Argo.

Hydrographes et Roboticiens explorent Guerlédan – Saison 3
![]() « Guerlédan : Hydrographes et Roboticiens explorent le lac de Guerlédan » est un projet de formation d’ingénieurs porté par l’ENSTA Bretagne et ses partenaires qui vise à réunir les communautés de la robotique et de l’hydrographie au sein d’un stage pédagogique de terrain.
« Guerlédan : Hydrographes et Roboticiens explorent le lac de Guerlédan » est un projet de formation d’ingénieurs porté par l’ENSTA Bretagne et ses partenaires qui vise à réunir les communautés de la robotique et de l’hydrographie au sein d’un stage pédagogique de terrain.
Un programme R&D innovant de plus de six mois dont deux semaines d’expérimentations intensives au Lac de Guerlédan a été inclus dans la formation des ingénieurs de dernière année de master à l’ENSTA Bretagne grâce au soutien de nombreux partenaires.

La troisième édition de ce projet a lieu cette année (2018/2019) avec de nouvelles thématiques d’étude ainsi que de nouveaux partenaires.
Les étudiants présenteront leurs travaux le vendredi 8 mars 2019.
Saison 3 : lundi 8 octobre 2018
C’est reparti pour une nouvelle saison d’expérimentations à Guerlédan. La vedette hydrographique Panopée et le zodiac R’lyeh ont retrouvé les eaux douces du centre Bretagne. Les huit roues du véhicule amphibie Argo foulent à nouveau le sol de la base Nautique de Guerlédan où 31 étudiants hydrographes et roboticiens ont pris leurs quartiers pour une semaine.

Les expérimentations vont pouvoir commencer sous un beau ciel bleu. Et pendant que les uns déchargent les camions, les autres prennent notes du plan de sécurité défini par EDF pour les interventions à proximité du barrage.
Les travaux sur le terrain commencent dès ce lundi pour une semaine et se poursuivront à nouveau sur le lac du 4 au 8 février. Les 10 sujets retenus seront présentés tout au long de la semaine à travers cette newsletter.
À l’extérieur, trois étudiantes hydrographes prennent en main l’Argo, équipé d’une centrale inertielle (OCTANS) et d’un laser (LiDAR topographique HDS6200). Dans sa version aquatique, le véhicule est doté de flotteurs et d’un propulseur pour s’aventurer sur le lac et faire un levé hydrographique (sondeur multifaisceau R2020). Ici, les étudiantes ont pour objectif de réaliser un modèle multi-technique du barrage EDF en combinant les acquisitions aériennes et sous-marines. Au programme de ce premier jour, la calibration de la partie émergée par un patch-test sur le mur d’un gymnase.

Mais pour pimenter cette première journée, le câble d’accélération de l’Argo a cassé : le véhicule a fini son voyage sur la remorque, et les étudiantes à pied. Pierre et Alain sont venus en renfort et le véhicule pétaradait de nouveau dans la base nautique en fin de journée.

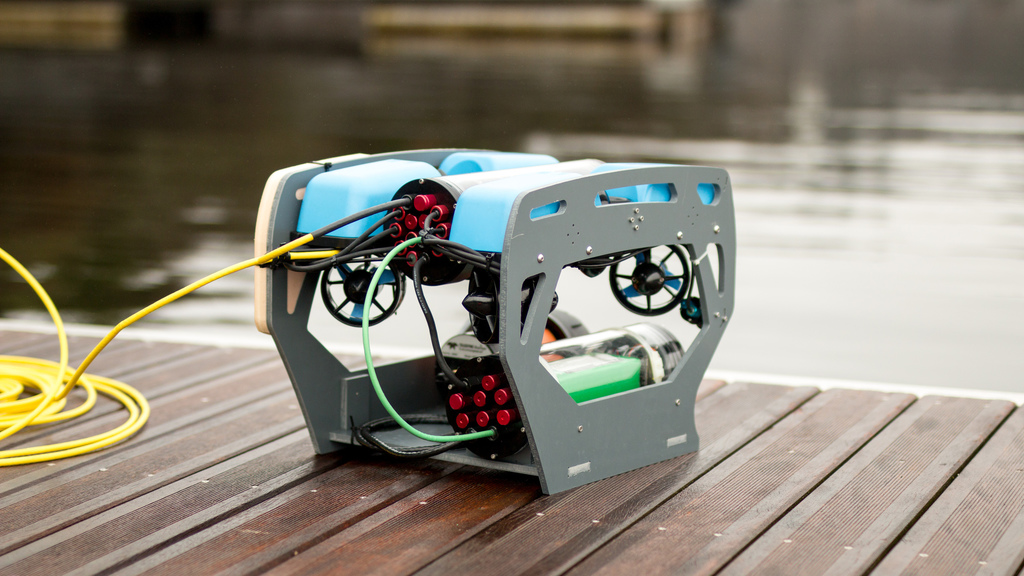
Plus bas au bord du plan d’eau, quatre autres étudiants roboticiens s’activent autour d’un robot autonome de l’entreprise Kopadia. Ici, il est question de mettre en place un suivi d’isobathe afin que l’AUV puisse suivre une courbe de niveau sous-marine en autonomie, et ainsi revenir sans se perdre. La méthode de régulation est dite « bas coût » car seuls un écho-sondeur et une centrale d’attitude seront utilisés pour cette fin.

Ce lundi, dédié au montage du drone et à sa prise en main par les membres du groupe, s’est terminé par la calibration du véhicule, le test de ses capteurs et l’acquisition de premières données.

Nous remercions nos partenaires l’AFHy, ECA, EDF, ENSG, Ifremer, iXblue, Kopadia, MacArtney, l’École Polytechnique, QPS, Teledyne, TERIA, ainsi que le SHOM, dont deux représentants ont supervisé ce lundi le groupe chargé de la cartographie des habitats… lacustres !