Saison 3 : mercredi 10 octobre 2018
Troisième jour au pays de Guerlédan, et déjà le soleil laisse sa place aux nuages et aux premières gouttes de pluie. Cela n’a pas empêché de poursuivre les expérimentations, ni la venue du Directeur de l’ENSTA Bretagne qui a pu échanger avec chaque groupe d’étudiants.
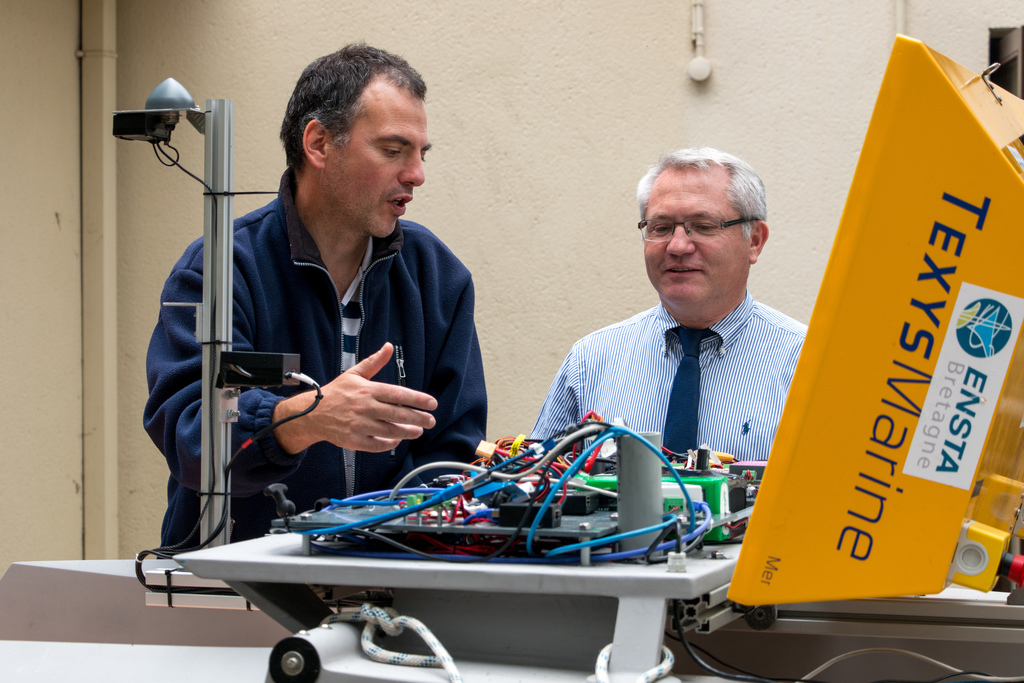
Le Directeur a également pris part à un levé bathymétrique avec deux étudiants du groupe de bathycélérité, qui après deux jours de codage informatique, ont enfin eu accès à la vedette Panopée.

Leur objectif : enregistrer des données du sondeur multifaisceau leur permettant de valider l’algorithme juste programmé. Ce dernier est une méthode innovante proposée par iXblue pour estimer le profil de célérité sonore du lac directement à partir des mesures d’un sondeur multifaisceau.
Ce profil est indispensable à l’obtention d’un modèle numérique de terrain de qualité, mais il est mesuré actuellement en descendant un capteur dédié à grande profondeur, ce qui peut être fastidieux. Le nouvel algorithme devrait rendre l’opération plus aisée. À présent, tout est prêt pour comparer la nouvelle méthode en situation réelle par rapport à l’état de l’art.
Le Directeur a aussi pu apprécier l’évolution de quelques robots sur le lac, dont le robot voilier autonome BRAVE qui a remporté la WRSC (World Robotic Sailing Championship) en 2018 à Southampton.
On le retrouve de nouveau à Guerlédan où trois étudiants ont pour objectif de naviguer « à l’ancienne » sans GPS. La mission est de rejoindre une position éloignée du point de départ du bateau en utilisant seulement une boussole et une caméra. En naviguant de bouée en bouée, dont leur position est connue, une stratégie doit permettre de garantir la détection des bouées suivantes par caméra.

La navigation entre les bouées s’effectue uniquement sur un suivi de cap, déjà implémenté par les élèves dès les premiers jours. Au préalable, il était nécessaire de s’initier au montage du voilier et à découvrir quelques notions de navigation à voile, notamment la manière de naviguer selon la direction du vent.
Une prise en main du suivi de waypoints, déjà implémenté et se basant sur le GPS, a permis de réaliser les premières missions autonomes. Pour des raisons de sécurité, une manipulation du voilier par radiocommande permet de reprendre la main si nécessaire. La direction du vent, actuellement mesurée par un capteur embarqué, pourrait par la suite être estimée avec des techniques actuelles de Deep Learning en se basant sur les données de la centrale inertielle et la détection d’une bouée afin de s’affranchir du capteur de vent.
Ce projet s’inscrit dans le cadre des travaux de thèse de Thibaut Nico (ECA Robotics).

Nous remercions nos partenaires l’AFHy, ECA, EDF, ENSG, Ifremer, iXblue, MacArtney, QPS, SHOM, Teledyne, TERIA, ainsi que l’entreprise Kopadia, spécialisée dans les domaines de l’inspection industrielle sous-marine et les mesures d’impact environnemental, qui participe au projet Guerlédan en mettant à disposition un AUV présenté dans la newsletter de lundi. Ce mercredi, deux représentants de Kopadia ont fait le déplacement pour suivre les avancées du projet de suivi d’isobathe.
L’École Polytechnique est également présente pour la suite du projet FlyingFish, porté ici par deux étudiants de deuxième année.