Saison 6 – Épisode 2

Aujourd’hui, nous avons redécoré le barrage de Guerlédan avec des mires. Ces disques noirs et blancs servent de référence pour recaler les images utilisées dans les algorithmes de photogrammétrie. Nous sommes montés en haut du barrage pour installer de manière précise ces mires en mesurant leur position à l’aide d’un GPS. D’autres mires ont également été installées sur la paroi du barrage.

Un ROV a également été déployé pour acquérir des images sous-marines en plus des images aériennes obtenues depuis un semi-rigide. Nous avons pu observer à 35m de profondeur, grâce au ROV, la vanne de vidange de fond du barrage.

Un robot bateau autonome – USV, Unmanned Surface Vehicles, a navigué sur le lac. Il a pour mission de trouver un objet immergé dans une zone de faible fond à l’aide d’une caméra sous-marine positionnée sous le robot. L’innovation liée à ce projet est de garantir formellement que le robot a pu observer complètement une zone. Cela nécessite de prendre en compte les incertitudes de positionnement du bateau ainsi que la portée de détection de la caméra. Être capable de garantir qu’une zone a été complètement explorée est essentiel dans des opérations de recherche et peut être transposée à d’autres milieux que le sous-marin.

Le lac de Guerlédan est également un bon environnement de test avant des expérimentations en mer. C’est le cas du projet qui cherche à comprendre le transport des larves d’huitres. Des capteurs de turbidité et de température sont utilisés afin de construire un modèle numérique simulant les courants et la température. Le développement des larves étant sensible à la température, il faut combiner cette information à celle des courants pour construire une simulation permettant de comprendre l’évolution et la localisation des populations d’huitres. Les protocoles d’acquisition des capteurs sont donc testés à Guerlédan avant d’être réalisés en pleine mer ce qui est plus difficile.

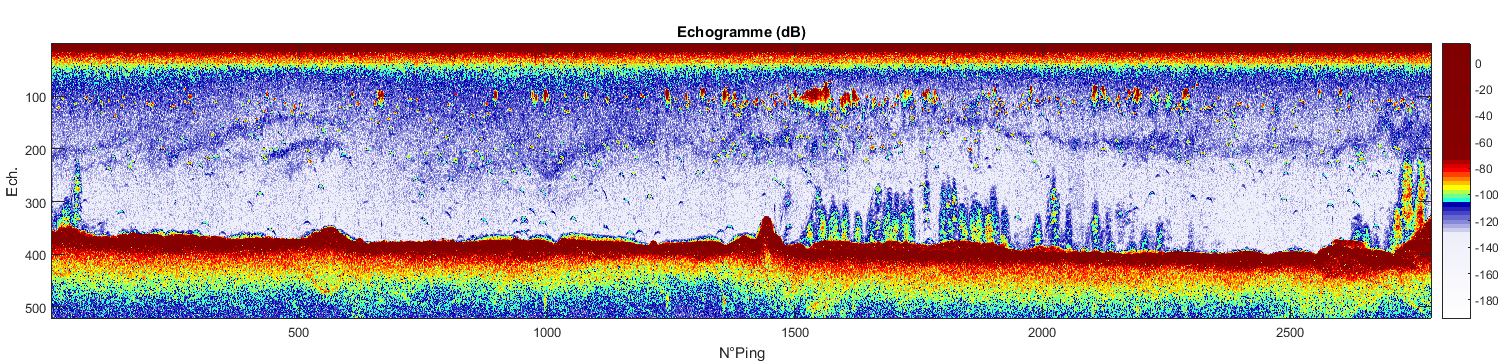
La faune du lac n’est pas en reste, un projet s’intéresse également à caractériser les espèces et la quantité de poisson dans le lac. Les signaux de trois sondeurs monofaisceau, émetteur-récepteur acoustique mono voix, sont utilisés et traités à l’aide d’algorithmes particuliers pour détecter les poissons. Les signaux obtenus sont représentés sous forme d’échogrammes qui présentent des structures particulières en fonction des espèces de poissons. Ce projet comporte également une dimension artistique : des étudiants de l’UBO en master ingénieur du son vont utiliser ces échogrammes pour générer un morceau de musique. Leurs travaux seront diffusés lors d’un festival.
La structure physique du lac présente aussi des variations importantes de température : environ 18°C en surface et 7°C au fond. Lorsque des instruments acoustiques sont utilisés, ces variations perturbent la trajectoire des ondes sonores. C’est pourquoi, lorsque les hydrographes utilisent des sonars pour cartographier le lac, ces variations physiques du milieu doivent être prises en compte pour donner une profondeur correcte. Un des projets s’intéresse à optimiser cette phase de correction. Au lieu de mesurer précisément la structure du lac à l’aide d’un capteur que l’on fait descendre jusqu’au fond, l’idée est de réaliser la correction directement avec les mesures acoustiques des sonars. Cela nécessite des algorithmes particuliers d’optimisation à appliquer de manière innovante sur les données acquises.

Nous avons également eu la visite de l’entreprise Kopadia qui co-encadre une thèse CIFRE en robotique. Ils ont déployé un AUV pour tester des algorithmes en prévision d’une mission d’inspection.