Guerlédan diaries – Day 4
A focus on a project : Autonomous bathymetric surveys

Six robotics and hydrography students in Guerlédan aim to map the seabed of the lake using an autonomous surface drone: we call that a bathymetric survey.
Bathymetry is the science of measuring the depths and relief of the ocean to determine the topography of the sea floor. ENSTA students have a companion named Ulysses: a semi-autonomous catamaran developed jointly by Texys Marine, a company manufacturing surface drones and sensors, and ENSTA Bretagne.
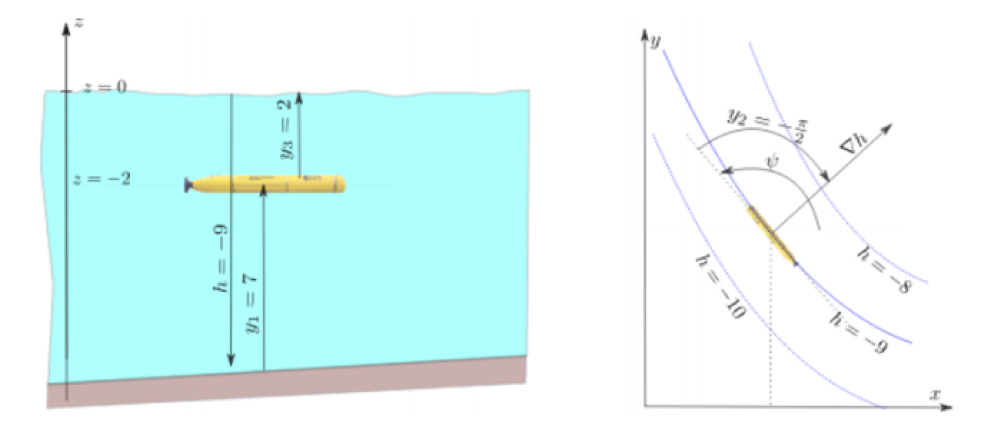
Currently, no device can carry out a bathymetric survey in complete autonomy. Instead, survey boats are brought back to the lab to check the results. In case of an inconsistency, or in case of an error, scientists have to repeat the entire mission. Our team’s main objective is to develop algorithms that allow Ulysses to carry out a mission in complete autonomy, that is to topographically map the seabed. For this purpose, Ulysses will be equipped with a multi-beam sounder – a type of sonar that is used to map the seabed -, a GPS and an inertial unit – an electronic device that measures a body’s specific force and its orientation. In addition, it must be able to perform real-time data quality control, which will indicate where it will have to come back to for additional surveys.

This project is at the crossroads between two different fields: Robotics and Hydrography. On one hand, a lot of middleware – interfaces between software and hardware – are used, such as ROS (Robot Operating System). On the other hand, in hydrography, most software are under Windows. Managing communication between these two worlds is a real ordeal for our engineers!