Saison 6 – Épisode 1
L’ENSTA Bretagne est de retour sur le lac de Guerlédan pour des expérimentations de terrain en robotique et hydrographie/océanographie. Comme chaque année, de nombreuses études très variées vont être menées. La première phase des expérimentations qui se déroule sur cette semaine d’octobre a pour objectif d’effectuer des premiers tests et acquisitions de données. Ils vont permettre d’orienter les différents projets et serviront de base de travail à notre retour à Brest. Ces tests seront suivis d’une semaine en février qui permettra de valider les projets.

Depuis notre arrivée sur le site lundi matin, nous avons installé plusieurs antennes sur le site. L’une d’entre elle va notamment servir à acquérir très précisément la position des robots et bateaux sur le lac. Le principe de fonctionnement revient estimer précisément l’ensemble des dégradations affectant les signaux GNSS, utilisés par nos GPS de voiture, depuis une position connue et à diffuser des corrections aux autres systèmes sur le lac. Il est ainsi possible d’obtenir une précision de l’ordre de la dizaine de centimètre contre plusieurs mètres habituellement.

Le projet de bouées GNSS low-cost va justement utiliser ces corrections comme référence. L’idée est d’utiliser un réseau de bouée équipé d’un récepteur GNSS pour mesurer le niveau des océans mais également de prévoir localement la météo. En effet, la vapeur d’eau de l’atmosphère perturbe les signaux GNSS, la mesure de ces perturbations devrait permettre de remonter à cette concentration en eau cruciale pour les modèles météorologiques.

Les corrections des signaux GNSS seront également utilisées par le projet de détection d’objets semi-émergés tels que les OFNI (Objet Flottant Non Identifié) ou les mines dérivantes. Un système expérimental composé d’un capteur Lidar – un laser rotatif en surface – et d’un sonar – un émetteur-récepteur acoustique sous-marin – a été conçu tout spécialement ces dernières semaines. En combinant les informations de ces deux capteurs, ce projet particulièrement innovant, espère pouvoir mieux détecter ces menaces pour la navigation.

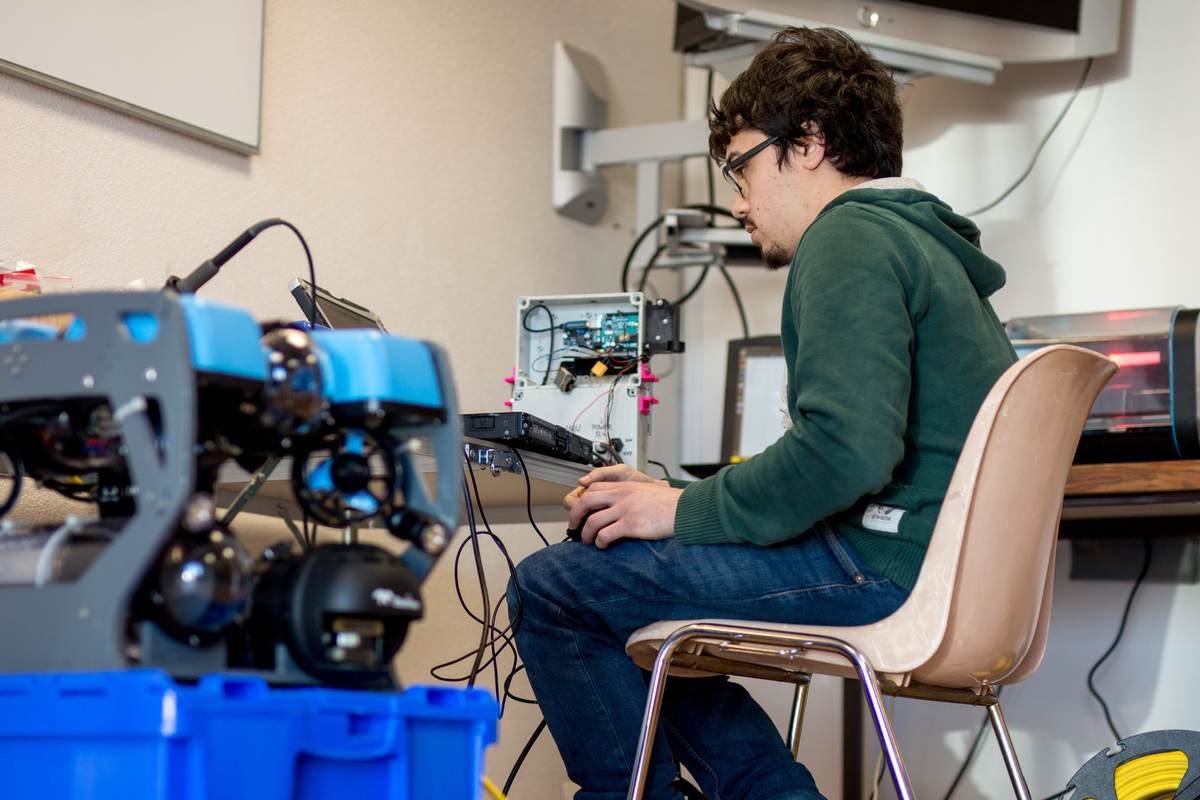
Guerlédan est un lac de barrage exploité par EDF. Nous avons la chance de pouvoir tout au long de la semaine demander l’accès au plus près des installations, dans une zone habituellement interdite à la navigation. Nous mettrons en œuvre un ROV (Remotely Operated Vehicle), un robot sous-marin téléopéré, pour tester les performances de la photogrammétrie sous-marine. Il s’agira de reconstituer en trois dimensions la paroi du barrage grâce à des photographies. Le lac est assez turbide, ce qui signifie une faible visibilité, d’où la difficulté de ce projet.

Les équipes de recherche de l’ENSTA Bretagne ont également pu conduire des expérimentations en robotique en plus des projets de deuxième et troisième année. Un AUV (Autonomous Underwater Vehicle) a été déployé. Sa mission consistait à suivre des isobathes, des lignes d’égale profondeur sous l’eau. Le lac, très encaissé est un excellent lieu d’expérimentations pour ce type de mission. A terme, ces algorithmes innovants permettront d’utiliser une méthode originale de localisation.

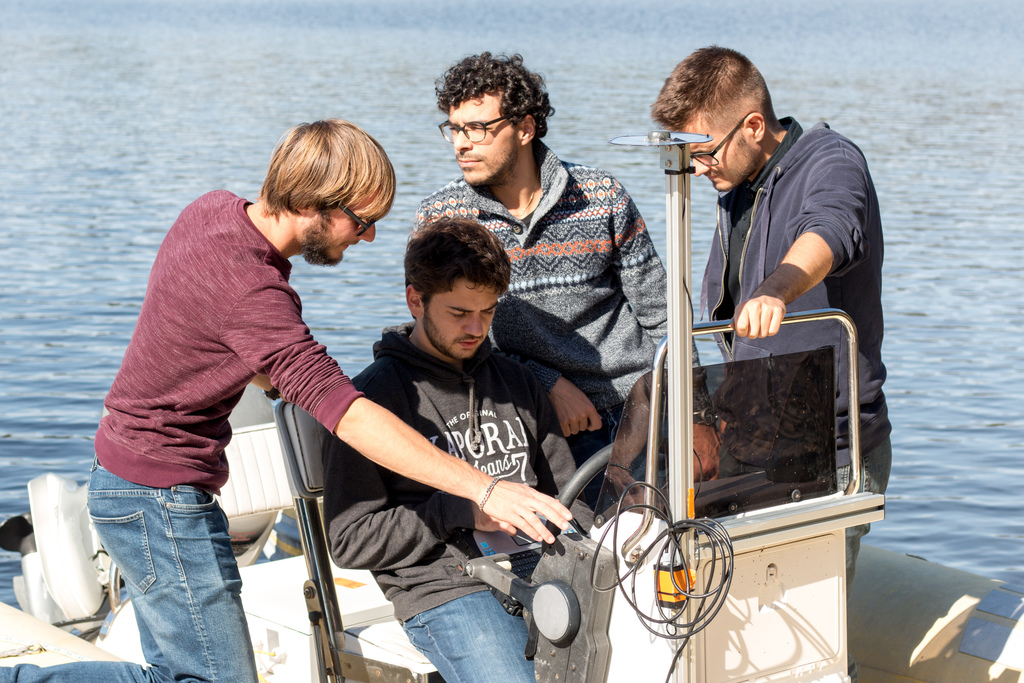
De petits bateaux autonomes ont également sillonné toute la journée les bords du lac. Il s’agissait des DDBoat, des robots bateaux à moteur entièrement conçus à l’école. Ils constituent la base de travail des élèves de deuxième année en robotique. L’objectif de la semaine est d’implémenter une intelligence artificielle pour que ces robots effectuent un trajet en autonomie.

Espérons que la météo reste clémente ces prochains jours !


























































 trois transducteurs du groupe « Sorbonne Université ». Nous avons réalisé différents tests pour éliminer le bruit anciennement trouvé sur les données d’Octobre et nous avons fait des acquisitions au même endroit qu’en Octobre pour pouvoir les comparer avec les données océanographiques et la localisation des bancs de poissons.
trois transducteurs du groupe « Sorbonne Université ». Nous avons réalisé différents tests pour éliminer le bruit anciennement trouvé sur les données d’Octobre et nous avons fait des acquisitions au même endroit qu’en Octobre pour pouvoir les comparer avec les données océanographiques et la localisation des bancs de poissons.

